Next, I separated the pole shoes from the rest. I knew as soon as I did it that making this work just got harder. The shoes have to be fastened somehow. The shoe alone helps a lot, and adding features that allow a kind of cleat to secure the show is also possible. But then I tried to imagine just making those shapes, and it stopped making sense.
Now I’m looking at something more like a Halbach array, turning the magnets sideways and facing them together to make the pole really want to exit the outer face. I’m getting perhaps the best result from this. Both manufacturability and effectiveness seem to be OK. I just have to make a bunch of wedges. A screw could hold each wedge onto the central ring. The ring can be aluminum so that no flux short-circuits through it.
The rotor length is about 5 inches. I could build 5 pancakes each 1" thick and then slide them onto the rotor. This procedure may allow each ring to be “clocked” to add up to a helical skew of the poles. This would eliminate a lot of pole-cogging.

It may be worth explaining:
I haven’t tried to model the stator teeth because:
a) it simplifies the model (20,000 mesh nodes versus 1 million)
b) this is a comparative check, not looking for absolute value of air gap flux (yet).
c) I am lazy.
FEMM allows me to sample values from the model, and I can draw a line across the model to compute total flux passing through an area, if I want. At this point I’m just looking for an effective arrangement that I can actually fabricate, before trying to optimize.
Think of the air gap as a linear resistor.
Think of the iron as a linear resistor.
The path that your flux takes will be so many inches of iron and so many inches of air.
An inch of air equals about 50,000 inches of iron so you can ignore the iron for ballpark calculations.
Two important things about air gaps.
- The wider the air gap, the less flux density.
- If the poles are too close together, the flux will bridge from pole to pole without going through the stator.
A suggested design:
Find a piece of pipe with a diameter close to the inner diameter of the stator.
Cut the pipe in strips the width that you wish to make your poles.
Make four rings to fit on the shaft that will support the strips of pipe as close as you want to the stator.
Two rings will be of steel or iron.
Two rings will be of a non magnetic metal.
Mount the rings on the shaft so that the magnetic rings are outermost and the non magnetic rings are inboard slightly.
Mount your pole strips so that each strip is supported and fastened at one end to the magnetic ring and supported and fastened at the other end by the inner non-magnetic ring.
Place your magnets inside the strips.
Fill in the small air gaps caused by the curvature of the pipe strips with a mixture of iron filings and adhesive.
Machine an pipe or tube to join the inner ends of the magnets together.
A quick summary of air gaps.
Make the gaps as small as possible where you want the flux to flow.
Make the gaps as wide as possible where you don’t want the flux to flow.
Got it. Thank Bill.
Now putting that to use. Here are two models in FEMM.
Sorry if you’re not keen on doing computer simulations. It is the only tool I currently have to predict flux density in the air gap. I do prefer “back of the envelope” calculations to work stuff out but in the 101 times I’ve asked on SE and Eng-Tips I have not been given any useful book recommendations that would help with this. Sure, Rosenberg’s bible is suggested every time. It’s not an analytical book however. I will ask again. “If you know of any book or textbook that sheds light on analytical methods to predict air gap flux in electric motors, please let me know”.
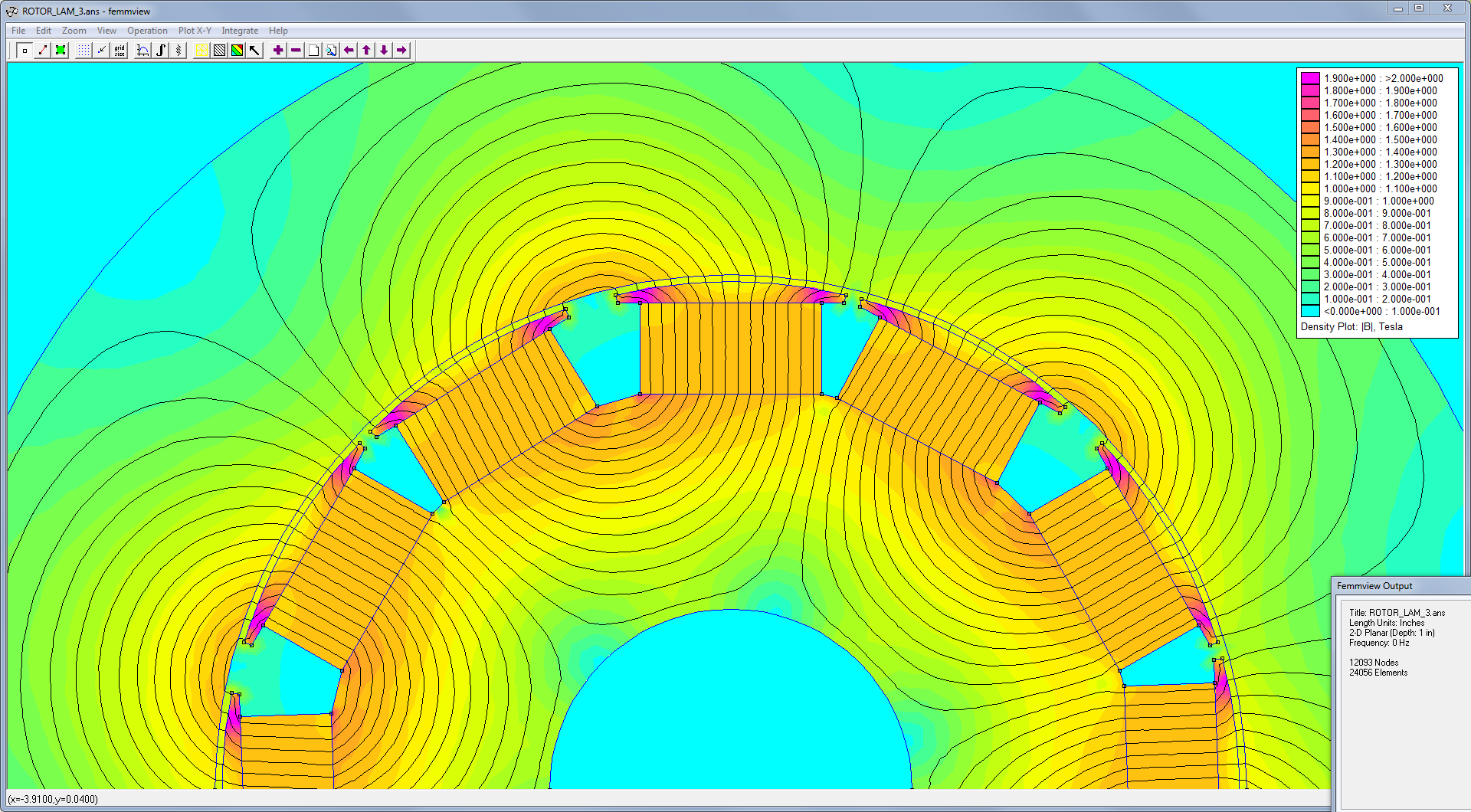
Here’s the simple motor conversion with no pole shoes.

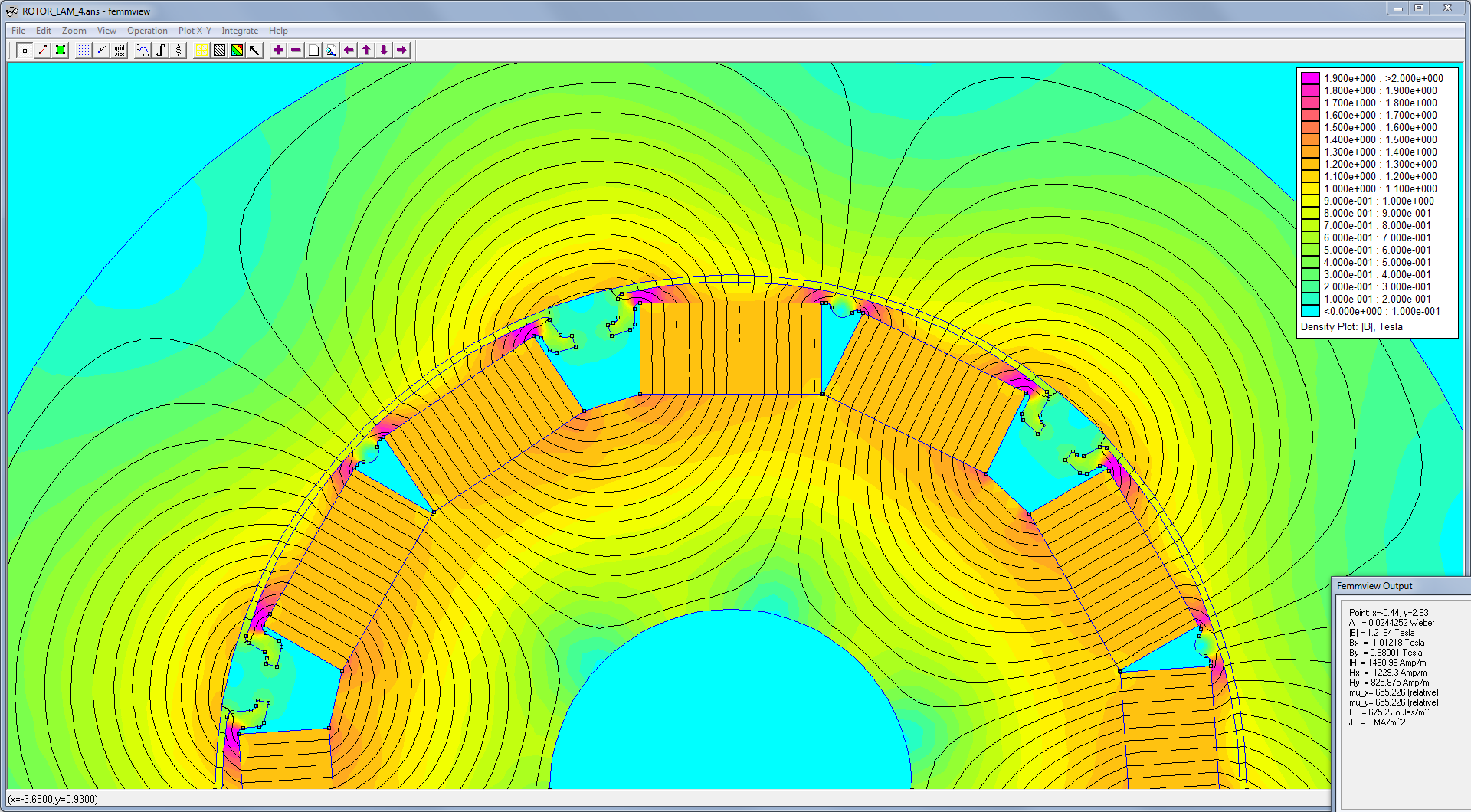
Here’s the modifed motor conversion with pole shoes, fabricated as you suggested, Bill. Started with 5" sched 40 pipe, sliced in 6 arcs, and machined 2 flats on the inside.

In each model, I can determine the flux across each pole by drawing a line through the gap, and selecting the integral function from the menu. The box in the lower right gives the answer in Webers.
Results:
Without pole shoes: 0.00141 Webers
With pole shoes: 0.00138 Webers
Hmmm… Not a big effect. Slight disadvantage to the pole shoes so far.
Can you see anything wrong with the comparison?
Please take this as a suggestion, not an authoritative answer.
I am not surprised by the answer. Where the advantage will be gained is that the arced poles will allow the air gap to be shortened further.
I appears that you have two adjacent poles. eg: N:N, S:S.
It may be advantageous to bridge them into one pole.
In my second year I studied magnetism and motors. I was prepared to estimate the HP of a DC motor from the physical dimensions for a challenge exam.
The problem was not on the exam.
I never did motors again.
I did some calculations a couple of times for electro-magnets.
I was working with electro magnets with no air gap in the magnetic circuit…
any air gap introduced into the calculations markedly reduced the calculated pull of the magnet.
Some basics:
I used the formula. MMF Magneto Motive Force equals Amp turns per inch of magnetic circuit.
Air gaps were multiplied by 50,000 to normalize with iron.
Not surprisingly, the air gap often predominated the calculations.
Hence my concern with air gaps.
What is the advantage of smaller air gaps and the resulting higher flux density?
Less RPM for a given induced voltage.
I hope that @Skogsgurra takes a look at this thread. He knows more about this than I ever will.
Got it now.
The trick is that the magnets drive the field, but they can be anywhere in the circuit. Thinking in terms of the “magnet circuit” is all I needed to realize that they don’t have to point at the stator teeth, and helped me understand some of the rotor diagrams that I was looking at on other websites. They didn’t always point the magnets at the stator and some looked a lot like this (below). Finally the coin dropped.

Hi Spar.
Please forgive me for the information on air gaps.
In my defense, it was a very long time ago and I was calculating electromagnets.
I did not realize that permanent magnets were part of the air gap.
As such, the air gap is much less critical than for an electro-magnet.
By the way, I would not worry too much about eddy currents in the rotor.
Any eddy currents will tend to stabilize the rotor.
Some synchronous alternators have solid pole pieces.
Many synchronous motors have squirrel cage windings for starting and to stabilize the speed when running.
Eddy currents, if they occur, may be your friend.
To that end, you may drill holes through the rotor and bolt it to hold the laminations together while cutting the slots for the magnets.
The squirrel cage winding may do a good job of holding the laminations together.
You can probably leave the bolts in place.
I like your latest drawing but I see a couple of possible challenges.
One; It looks as if you have told your program that the center is non-magnetic.
If the center is magnetic, it will bypass much of your flux.
Constructability may be a challenge.
What do you see as the drawbacks of automotive alternators?
I see a lot of advantages.
They are long lasting and rugged.
Driving down the highway on a freight truck on a rainy day for year after year is an indication that they will survive high humidity with only basic shielding.
You are familiar with the great weight and size advantage gained by 400 Hz as opposed to 60 Hz.
A fast spinning alternator is sending a lot more than 60 Hz to the rectifier bank.
Voltage? A fast spinning alternator will develop 100 Volts or more.
Are you familiar with load dump?
When there are a lot of lights on in a vehicle the voltage regulator is sending a lot of current through the field to keep the voltage up. If a large load, such as all the lights on a vehicle are suddenly turned off, the voltage may spike to 100 Volts before the field strength decays.
When gas was cheap, there were conversion kits to use the alternator in a pickup to generate enough voltage to drive power tools. The drawback was that the engine had to be running quite fast and the popularity of these kits went down as the price of gas went up.
So, a 60 Amp alternator developing 100 Volts, that’s 6 kW.
100 Amp and 120 Amp alternators are becoming more common. 10kW and 12 kW respectively.
The current drain for the field is a very small percentage of the output.
Some older voltage regulators may be fed by a resistive voltage divider and fooled into regulating at a higher voltage.
That’s the upside. What’s the downside?
Hi Bill,
that’s a lot of questions and suggestions. I’ll work my way through one by one.
I’ve recently learned a few things about the air gaps myself, but I’m still working on a better understanding of the effects that the stator currents will have on the rotor (back EMF). I would expect that current in the wire will apply a back field onto the rotor, and the eddies induced by that would have a heating and power loss effect. Maybe that’s small, maybe it’s even small if the rotor is a solid.
If solid parts are safe to use everywhere on the rotor, then that simplifies manufacturing to some extent. It would be simple to just have 6 long screws to hold the pole shoes down. But if heating really isn’t a problem at all, then it’s even easier to just bond all of these pieces together with aerospace structural adhesives.
At the center you’re right. I have specified that the central shaft is steel, around it is a thick aluminum tube, and then on that are the magnets and steel wedge pieces. Using aluminum prevents short-circuit flux, although some does still get through.
I am still concerned about ease of construction. Using solid pieces is a step in the right direction.
Something to be noted, which is not trivial and driving some of my design decisions. Permanent magnets will cause some degree of cogging. The tooth-to-tooth attraction will be reduced somewhat by the smooth arc segment poles I have, but I still expect some. As an additional measure to combat cogging, keep in mind that I will not be building this rotor as one whole piece. It will have layers. 4 or 5 pancakes, so to speak. Each layer will be about 1" thick, and each layer will be turned relative to the ones beside it. If the first layer has a pole pointed at 12 o’clock, then the one beside it will point its pole at 12:01. The next at 12:02. The whole rotor will not have any one pole pointed directly at any particular stator tooth, yet the poles will be close enough together to work in unison as they pass each pole in the windings. The exact angle is determined by the number of pancakes I need so that the group of them add up to a “net-zero” torque passing each pole.
Auto Alternators. This won’t go well.
The ones I have seen are belt-driven with varying ratios from the engine. Perhaps 2:1 or 3:1, so if they reach a voltage to start charging when the engine is at 500 RPM, then they are spinning about about 1000 RPM or more. So on a 12V system, they need more than 1000 RPM to put any current into the battery. To get to 100 Volts, then holding the truck engine to 5000 RPM would get you the 10,000 RPM on the alternator you’d need.
I get that this works on your truck when you need it in an emergency, but these are ludicrous speeds for a wind turbine. I’ve been going to great lengths to keep the RPMs of my wind turbine down to 400 RPM and below. Ever.
Gearboxes and belt-drives are the best way to make a terrible wind turbine worse.
The power of a wind turbine is determined by the blades and the wind speed, not the alternator.
Automobile engines run for maybe 1-2 hours a day. Trucks do more in this regard. Wind turbines should spin 24/7. Any auto alternator used in a wind turbine will suffer bearing failure in less than a year.
FYI
my WT has just started showing signs of bearing failure, mostly because it’s -25C. The 6206 bearings have lasted 4-5 years or so, minus one year of inactivity.
Also:
I went to e-bay looking for alternators anyway, in some ways just for fun and also in hope that maybe something comes onto the market that will change the game for me. Nothing yet.
Thank you for your reply.
OK I’ll forget automotive alternators for wind turbines.
Understood. The alternator should be capable of extracting the power produced by the wind turbine. The point is a lot of capacity in a small package due to the high frequency.
Re; eddy currents.
It takes AC to generate eddy currents.
In an auto alternator, the rotor is not laminated.
AC is induced in the stator and the stator is laminated.
The old DC generators used solid field poles.
The voltage induced in the armature windings was AC but the brushes were continually changing the connections to extract DC. The armature was laminated.
An illustration of this is the conversion to brushless excitation that was done on a large number of diesel generators.
Originally these had a DC exciter mounted on the generator shaft.
The DC was taken off by conventional brushes and fed back into the rotating field windings by conventional slip rings.
Then some genius grooved the main shaft so that three wires could be passed past the bearing.
He removed the brushes and connected the wires to three commutator segments 120 degrees apart. Now he had three phase power.
He mounted rotating diodes and fed the resulting DC to the field windings.
In later conversions the commutator was removed completely.
I installed, serviced and repaired quite a few of these converted sets.
The point is, AC,will induce eddy currents even at low frequencies.
DC, basically no eddy currents.
A synchronous motor will have a squirrel cage winding for starting.
When running, a synchronous motor may be subject to a speed oscillation of plus and minus a few degrees.
That is enough to generate enough current and counter- torque in the squirrel cage winding to dampen the oscillations.
I am not inclined to worry about eddy currents in a PM rotor until I get a conflicting explanation.
Some out of the box thinking.
What about a stator parallel to the shaft rather than parallel?
I am thinking about a fairly large magnetic plate turned by the shaft.
A series of magnets mounted on one side of the plate.
They may be surrounded and supported by an aluminum plate.
The stator would face the magnets.
I am thinking possibly a series of small transformers with one side of the core removed and that side facing the rotating magnets.
Cogging; We can rectify the output of each coil and then combine the outputs in parallel.
That way we can have the ratio of magnets to core as N+1 or N-1. That should greatly reduce cogging.
One advantage is with a greater diameter we will get a greater voltage for a given RPM.
One disadvantage is that a large diameter behind the wind turbine may not be good.
I have quite a few old mercury vapour ballasts. It’s 20 below in my shop just now.
When it warms up a little I will cut one open and see if it has any possibilities.
I’m trying to visualize that but probably not getting it.
Unless you’re talking about an axial flux alternator, in which case I know exactly what you mean. I’ve built some and they suck.
If it’s something else, can you come up with a diagram?
It may be more informative to explain the concerns driving my thoughts and the parameters that I am trying to optimize.
The voltage induced is a function of the strength of the magnetic flux and the speed at which the flux is cut.
No matter how strong your magnets are, you won’t get the field strength much past the saturation of the iron.
You can rewind a motor for a higher voltage but the available space in the slots means that more turns must be a smaller wire, limiting the safe working current.
With the strongest magnets available, simple math indicates that an 1800 RPM, 480 Volt motor running as a generator at 450 RPM will develop 120 Volts.
One way to increase the speed which the flux is cut, is to increase the diameter of the rotor.
But, before I try to re-invent the wheel. are you satisfied with the performance of the re-purposed motors or would you like something better?
One of my faults is a tendency to try to increase efficiency past the point of diminishing returns.
ps. Working on a drawing. I sometimes don’t use my CAD program for years at a time and I was never very good to start with. It’s slow. grin
1 Like
Yup, we’re on the same page there. The way you’ve put it is accurately describing my goals. Get the flux in the stator teeth up to the saturation point of the iron. The V/RPM analogy is interesting - something I’d wondered about before but really didn’t have any reason to believe it made sense. And it’s not a subject I can easily just look up in a book because nobody writes books about converting motors, of course.
So if it really is a realistic guide, then:
480V/1800RPM = 0.267 VAC / RPM is the baseline in series, and 0.133 VAC / RPM in parallel
If that’s converted to DC by rectifying, then it’s ( * 1.41)
0.376 VAC / RPM in series and 0.188 VAC / RPM in parallel
When I converted the previous Baldor 3HP, I tested its open-circuit voltage: 37.3 VDC @ 100 RPM
which is exactly the same! So I’ve always believed the V/RPM relationship, but never really could explain it like you can.
The diagram in my last posting has about 1.8T peak flux in the stator teeth, so I’ve pretty much got it to the saturation point now. I’ve done a few other combinations since then, trying to get the same field intensity using magnets 3/8" thick rather than 1/2" thick, and getting close. The gap clearance has to be really tight.
Bill,
That really worked. Your suggestion made a lot of things clear, and last night I was able to crunch through calculations that make complete sense. I can take the V/RPM from normal operations, and then by measuring the stator tooth arrangement inside the motor, the number of wire turns per coil, plus the number of poles, phases, and coil groupings, can get approximate flux per coil per pole. About 1.6 Tesla. This lined up really nicely with what’s being predicted in the FEMM simulations, and also gives me an upper limit to the mass of magnets I need to put on before getting diminishing returns.
It turns out I can get what I want with magnets 3/8" thick instead of 1/2". This saves money and is easier to fit on the rotor. Thank you again for sticking with me and my (probably confusing) explanations of what I’m doing.
How much extra weight can a wind turbine tower support.
I am thinking along the lines of a 1:4 speed increase,
That will give 4 times the voltage and four times the kW for a given size of generator.
Will the saving in generator size compensate for the weight of the gearbox?
The differential from a small car with independent suspension or the front diff from a 4x4 pickup will last forever.
Block the spider gears and shaft drive the generator below the turbine axis.
Has anyone done this?
Comments?
Of course people put gearboxes on wind turbines.
The giant Vestas and Siemens machines run at synchronous speed with the grid and rely on gearboxes to make it possible to use a reasonably sized generator.
In medium size projects, there have been a mixture of not only gearboxes but also variable pitch in all combinations. Here’s an example of that:
http://www.wind-works.org/cms/index.php?id=625&tx_ttnews[tt_news]=4331&cHash=98b15e22e0afd78640c43a3d8979433a
The reasons that these larger machines have gearboxes is because right-sized off-the-shelf generators exist and are economical to employ in the machine, provided that the speed mismatch can be dealt with. A 4-pole generator is easy to find, and the gearbox that can handle the ~50kW mechanical power with a step-down ratio of about 20:1 is also available. That lets the blades run at 100 RPM then variable-pitch can be used to capture a decent power curve in a wide range of wind speeds. Build this well and the machine will work.
Many of the components listed above will need some customization to make them serviceable together in a medium-size wind turbine (20 - 200 kW). There are lots of examples of these. But they certainly all require maintenance. A statement that “it will run forever” ignores the need to replace and replenish oil in the gearbox, and to monitor for leaks that could lead to catastrophic failure. Many times, the assumption that maintenance will be done has been made, and successfully so, allowing these wind farms to run productively for a long time. You can see the work platforms on the towers etc.
In very small wind <10kW the assumption of maintenance is not a sure thing at all. You are selling to rich people, home owners, greenwashers. Speaking for myself, I absolutely do not want to have to maintain an oil reservoir that’s 50 feet up on a tower. Lowering and raising the tower is not a delightful experience. It is a chore and exposes my equipment to risk - the lower process is an order of magnitude more dangerous to my equipment than anything the weather can throw at it.
I’ve seen people post stories and photos about their WT projects with gearboxes. Those were fun to watch, and certainly some of these builders succeeded for a while. But in comparison to my machine that has run 10 years with 2 tower moves to replace bearings, every single one of them say that they “do not have a wind turbine any more”.
Back to my current project.
Bill, your tip about the flux in the stator really works. I can do back-of-the envelope calculations and get a number that seems reasonable.
Does 1.6 Tesla seem reasonable to you?